






Description :
Robot Manipulation is the basic Science in Robotics. Most of the modern theories arise from the classical concepts of Robot manipulation.
In the last two decades, there has been a tremendous surge of activity in Robotics, both at in terms of Research and in terms of capturing the imagination of the general public as to its seemingly endless and diverse possibilities.

This period has been accompanied by a technological maturation of Robots as well, from the simple pick and place and painting and welding Robots, to more sophisticated assembly Robots for inserting integrated circuit chips onto printed circuit boards, to mobile carts for parts handling and delivery. Several areas of Robotic automation have now become “standard” on the factory floor and the field is on the verge of a new explosion to areas of growth involving hazardous environments, minimally invasive surgery, and micro electro-mechanical mechanisms.
A manipulator mechanism is a device used to manipulate materials without direct contact. It is an arm-like mechanism that consists of a series of segments, usually sliding or jointed, which grasp and move objects with a number of degrees of freedom.
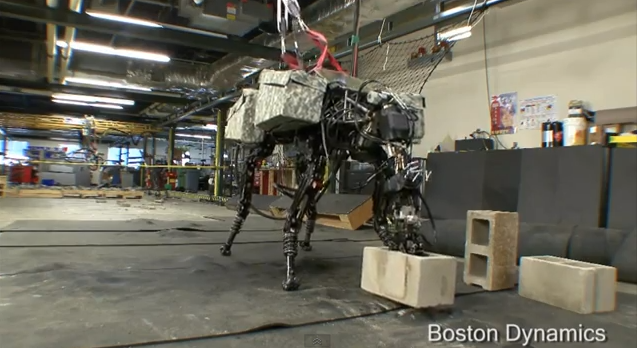
Our loyal readers might be familiar by now with Boston Dynamics, the local Robotics company creating with remarkable behavior: mobility, agility, dexterity and speed, the most advanced robots on Earth. That includes the "BigDog", one of a few models utilizing the company's LS3 - legged squad support system - technology. But what happens when you add a brick throwing arm to those legs? Uh-Oh...

Yeap, you heard me right. Rise of the machines! 😀
"BigDog" now handles heavy objects and can fling them, using human motion as a model. The mechanical dog is over a meter tall and weighs more than 100 kilograms (which is more than the average man), and can throw using its whole body, 35lbs of concrete blocks across a room (a bit more than 17 ft). The company has been steadily improving “BigDog” for years with funding from the Army Research Laboratory (RCTA) and seems to have high hopes for this latest advance...
"BigDog" now handles heavy objects and can fling them, using human motion as a model. The mechanical dog is over a meter tall and weighs more than 100 kilograms (which is more than the average man), and can throw using its whole body, 35lbs of concrete blocks across a room (a bit more than 17 ft). The company has been steadily improving “BigDog” for years with funding from the Army Research Laboratory (RCTA) and seems to have high hopes for this latest advance...

"The goal is to use the strength of the legs and torso to help power motions of the arm. This sort of dynamic, whole-body approach to manipulation is used routinely by human athletes and will enhance the performance of advanced Robots. Boston Dynamics is developing the control and actuation techniques needed for dynamic manipulation", a Boston Dynamics spokesperson said.

“There are a wide variety of applications, both military and civilian, where strong and dexterous manipulation would be needed,” another spokesperson added. “Think of anything a person does now in the field, such as clearing ruble, fighting a fire, digging up an IED, etc. Rather than focus on a specific mission right now, the RCTA program is focused on core functionality that will be useful for many applications.”
You might say it is hard to imagine any real world practical applications for this project. Actually almost everything has a real world practical application, especially if imagination flows without bounds. Moreover, in this case, it is not even hard to imagine! How about: close quarter combat, tear/rip the enemy (human or other robot) apart or throw the enemy somewhere to be terminated, rescue excavation (after an explosion, mine collapse, bombing, earthquake etc.)?
The problem though is that when we create things for destruction, they get used for destruction. What do you think? Let us know in the comments below.
Subscribe on our Daily Newsletter to get free updates straight to your inbox! If you want to get in touch, then contact us by using this form.
*by andreascy*











